
Este proxecto describe como se pode mover un motor de corrente continua en dirección cara adiante ou atrás usando un control remoto de TV ou DVD.O obxectivo é construír un controlador de motor bidireccional sinxelo que utilice un tren de pulsos de infravermellos modulados (IR) de 38 kHz para o propósito sen utilizar ningún microcontrolador ou programación.
O prototipo do autor móstrase na figura 1.

Circuíto e funcionamento
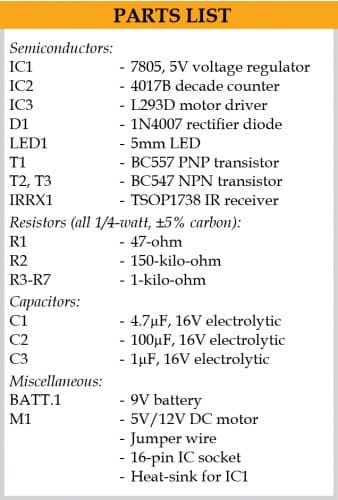
O diagrama de circuíto do proxecto móstrase na figura 2. Está construído arredor do módulo receptor IR TSOP1738 (IRRX1), contador de décadas 4017B (IC2), controlador de motor L293D (IC3), transistor PNP BC557 (T1), dous transistores BC547 NPN ( T2 e T3), fonte de alimentación regulada de 5 V (IC1) e unha batería de 9 V.
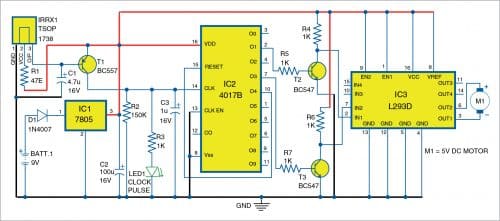
A batería de 9 V conéctase a través do díodo D1 ao regulador de voltaxe 7805 para xerar 5 V CC necesarios para o proxecto.O condensador C2 (100 µF, 16 V) úsase para o rexeitamento da ondulación.
En condicións normais, o pin de saída 3 do módulo IR IRRX1 está no nivel lóxico alto, o que significa que o transistor T1 conectado a el está desconectado e, polo tanto, o terminal do seu colector está no nivel lóxico baixo.O colector de T1 manexa o pulso do reloxo do contador de décadas IC2.
Ao apuntar o control remoto cara ao módulo IR e premer calquera tecla, o módulo recibe os pulsos IR de 38 kHz do control remoto.Estes pulsos invírtense no colector de T1 e entréganse ao pin de entrada do reloxo 14 do contador de décadas IC2.
Os pulsos IR que chegan incrementan o contador de décadas á mesma velocidade (38 kHz) pero debido á presenza do filtro RC (R2=150k e C3=1µF) no pin de entrada do reloxo 14 de IC2, o tren de pulsos aparece como un único pulso en o contador.Así, ao premer cada tecla, o contador avanza un só contador.
Cando se solta a tecla do control remoto, o capacitor C3 descárgase a través da resistencia R2 e a liña do reloxo pasa a ser cero.Así, cada vez que o usuario preme e solta unha tecla do control remoto, o contador recibe un único pulso na súa entrada de reloxo e o LED1 brilla para confirmar que se recibiu o pulso.
Durante o funcionamento pode haber cinco posibilidades:
Caso 1
Cando se preme a tecla do control remoto, chega o primeiro pulso e a saída O0 do contador de décadas (IC2) vaise alta mentres os pines O1 a O9 están baixos, o que significa que os transistores T2 e T3 están en estado de corte.Os colectores de ambos os transistores son levados a un estado alto mediante resistencias de 1 quilo-ohmios (R4 e R6), polo que os dous terminais de entrada IN1 e IN2 do controlador de motor L293D (IC3) fanse altos.Nesta fase, o motor está en estado apagado.
Caso 2
Cando se preme unha tecla de novo, o segundo pulso que chega á liña CLK incrementa o contador nun.É dicir, cando chega o segundo pulso, a saída de O1 de IC2 vai alta, mentres que as saídas restantes son baixas.Así, o transistor T2 conduce e T3 está cortado.O que significa que a tensión no colector de T2 baixa (IN1 de IC3) e a tensión no colector de T3 faise alta (IN2 de IC3) e as entradas IN1 e IN2 do controlador de motor IC3 pasan a 0 e 1, respectivamente.Nesta condición, o motor xira en dirección cara adiante.
Caso 3
Cando se preme unha tecla unha vez máis, o terceiro pulso que chega á liña CLK incrementa o contador de novo nun.Polo tanto, a saída de O2 de IC2 é alta.Como nada está conectado ao pin O2 e os pines de saída O1 e O3 son baixos, polo que os dous transistores T2 e T3 pasan ao estado de corte.
Os terminais do colector de ambos os transistores son levados a un estado alto mediante resistencias de 1 quilo-ohmios R4 e R6, o que significa que os terminais de entrada IN1 e IN2 de IC3 fanse altos.Nesta fase, o motor está de novo en estado apagado.
Caso 4
Cando se preme unha tecla unha vez máis, o cuarto pulso que chega á liña CLK incrementa o contador en un por cuarta vez.Agora a saída de O3 de IC2 é alta, mentres que as saídas restantes son baixas, polo que o transistor T3 conduce.O que significa que a tensión no colector de T2 faise alta (IN1 de IC3) e a tensión no colector de T3 faise baixa (IN2 de IC3).Así, as entradas IN1 e IN2 de IC3 están nos niveis 1 e 0, respectivamente.Nesta condición, o motor xira en sentido inverso.
Caso 5
Cando se preme unha tecla por quinta vez, o quinto pulso que chega á liña CLK incrementa o contador unha vez máis.Dado que O4 (pin 10 de IC2) está conectado ao pin 15 de entrada de Restablecer do IC2, ao presionar por quinta vez o IC do contador de décadas volva á condición de reinicio con O0 alto.
Así, o circuíto funciona como un controlador de motor bidireccional que se controla cun control remoto por infravermellos.
Construción e probas
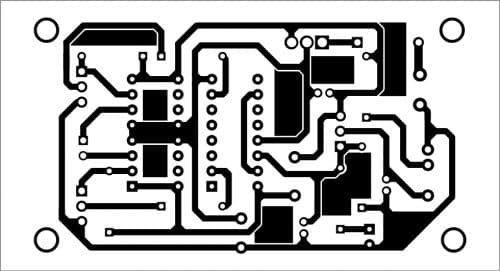
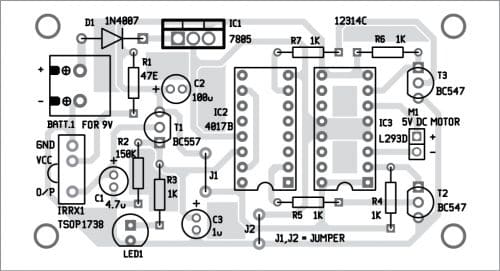
O circuíto pódese montar nun Veroboard ou nunha PCB cuxa disposición de tamaño real se mostra na figura 3. A disposición dos compoñentes para a PCB móstrase na figura 4.
Descarga os PDF de deseño de PCB e compoñentes:pulse AQUÍ
Despois de montar o circuíto, conecte a batería de 9V en BATT.1.Consulte a Táboa de Verdade (Táboa 1) para o funcionamento e siga os pasos descritos no Caso 1 ao Caso 5 anteriores.
Editado por Lisa
Hora de publicación: 29-09-2021